Collision Detection Algorithm
Overview
Algorithm efficiency analysis
The theoretical time complexity of the above four algorithms is as follows:
ExhaustiveCollisionDetection:
\(O(n*m)\)
where n denotes the total number of balls and m denotes the number of balls to be asked.
PrecisionCollisionDetection:
\(O(n*log(n)+\Sigma{r}*logn+p)\)
where n denotes the total number of balls, m denotes the number of balls to be asked, k denotes the presicion we set and p denotes number of spheres that actually collided.
RebuildQuadTreeCollisionDetection:
\(O(n*log(n) + m*log(n)+p)\)
where n denotes the total number of balls, m denotes the number of balls to be asked and p denotes number of spheres that actually collided.
RemoveQuadTreeCollisionDetection:
\(O(r*log(n)+m*log(n)+p)\)
where n denotes the total number of balls, m denotes the number of balls to be asked, r denotes the number of spheres whose position status has changed and p denotes number of spheres that actually collided.
In order to test the efficiency of these algorithms, we modify the parameters including the total number of balls, the number of queries, the number of changed balls, and the iteration rounds to set the test scenario. The data in the following table comes from the most representative scenarios
T: the number of all balls in the map
Q: the number of query balls, which usually means the moving balls in the map
C: the number of changing balls, which means the number of collisions
Exhaustive |
Precision |
Rebuild QuadTree |
Remove QuadTree |
|
|---|---|---|---|---|
T=3000 Q=300 C=600 |
688ms |
14ms |
47ms |
48ms |
T=3000 Q=300 C=1500 |
1067ms |
16ms |
50ms |
178ms |
T=10000 Q=1000 C=2000 |
8384ms |
61ms |
339ms |
497ms |
T=10000 Q=2000 C=5000 |
12426ms |
86ms |
586ms |
2460ms |
T=30000 Q=6000 C=3000 |
127000ms |
403ms |
5691ms |
8419ms |
In order to see the pros and cons of each algorithm more intuitively, we integrated test data and drew diagrams of four algorithms and various parameters as follows:
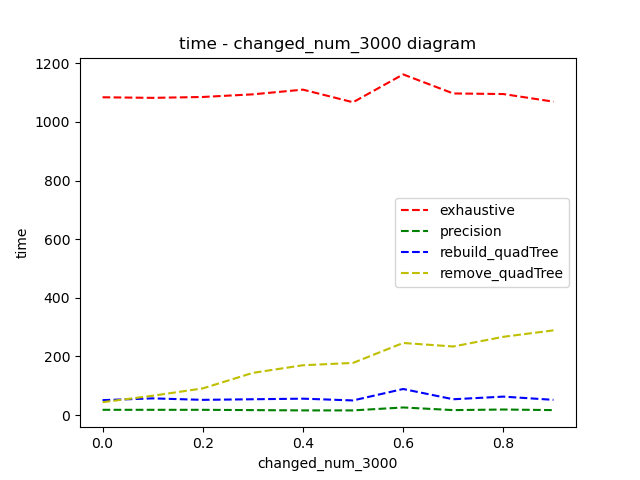
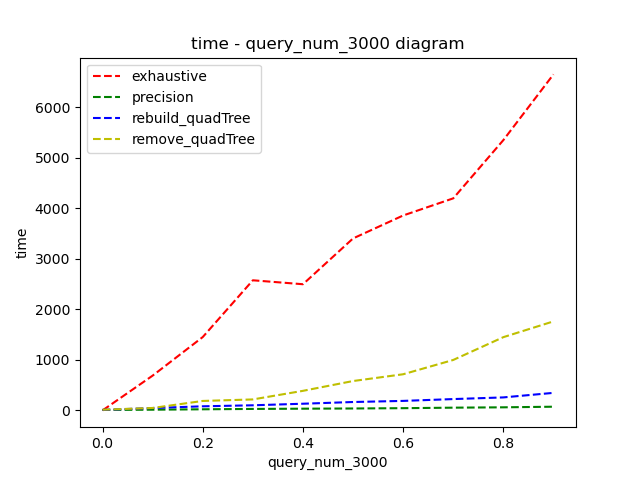
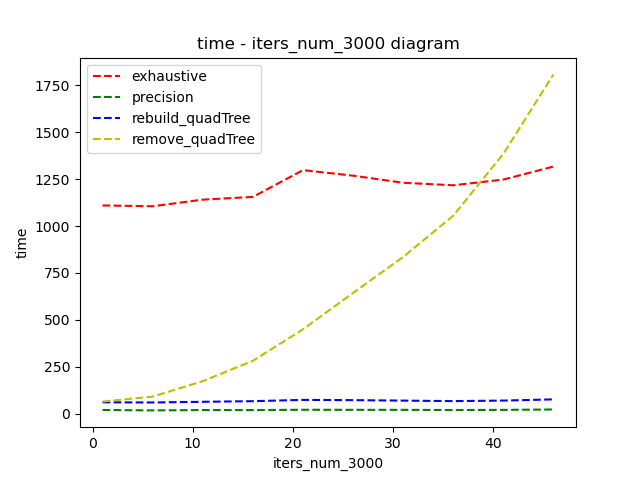
According to the results, we can think that the PrecisionCollisionDetection algorithm is far better than the other algorithms in terms of efficiency and stability.